|
|
 FlexRay - Construcciµn FlexRay - Construcciµn
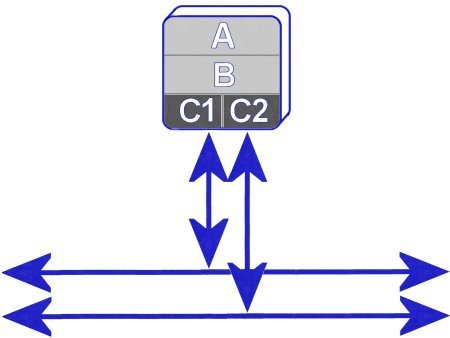
| Designaciµn | Funciµn |
| A | Microprocesador |
| B | Controlador |
| C1 | Bus driver - canal 1 |
| C2 | Bus driver - canal 2 |
Existen aun mÃs ventajas, pero ahora ya basta con el prµlogo. Fieles a nuestro lema de ir de lo simple a lo complejo, empezamos con la variante mÃs simple la de dos
participantes. Los que pueden estar hasta 24 metros separados del uno al otro, y solo pueden crear un problema para el Ãrea de vehÚculos comerciales. AdemÃs son
posibles hasta 20 participantes mÃs con tambiÕn un mÃximo de 24 m de distancia, pero como mÃximo sµlo 72 metros.
Partiendo de 10 Megabits/s por canal, que es 20 veces mÃs rÃpido que los 500 kBit logrados en la prÃctica por el CAN de alta velocidad. Pero tambiÕn se pierde algo de la
velocidad, debido ha que el FlexRay tiene asignaciones de tiempo firmes y ante todo no es controlado por eventos. De esta manera no se crean mÃs desventajas para los
mensajes de baja prioridad. Tal sistema se denomina tambiÕn como deterministico (determinante).
El sistema se compone del segmento estÃtico y el dinÃmico. El primero se divide en 'Static slots', el segundo en 'Mini slots'. A estos nodos de red, como el radar de distancia,
ahora se les asignarÚan lugares fijos para transmitir en la parte estÃtica. Los menos importantes, como un nodo de red provisto de informaciµn por (hasta tres) indicadores del
combustible, tendrÚan que hacer cola cada vez que asignan las mini ranuras (Mini slots).
Menos importantes, como por ejemplo uno de los (hasta tres) indicadores del combustible con la informaciµn facilitada por los nodos de red, tendrÚan que ponerse en fila
cada vez que reparten las franjas diminutivas.
| La topologÚa bÃsica del FlexRay es la estrella, pero tambiÕn es el bus posible
|
La estructura de la red (topologÚa) puede ser en forma de bus o estrella y, por lo tanto, permite un cableado mÃs flexible. El bus de topologÚa en estrella se distingue por activa
y pasiva, dependiendo de que la estrella tenga un acoplador central, es una especie de transmisor entre las unidades de control individuales de la estrella. Este proporciona
la alta velocidad de transmisiµn incluso con una red en forma de estrella, que a falta de este componente es mas baja.
Primer uso en serie:
Control del amortiguador (Adaptive
Drive) en el BMW X5 (2007)
|
La estrella activa forma su propio bus, en el que el acoplador reparte los mensajes. TÚpico de FlexRay es, por ejemplo aquÚ la tarea especial de un nudo y por lo tanto su
acentuaciµn hacia los demÃs. FlexRay requiere tambiÕn mÃs control en los nodos. Aparte del controlador y el transmisor, el que aquÚ se llama driver del bus (Bus driver), se le
aþade el llamado controlador de comunicaciones (Imagen en la parte superior).
Los 10 Megabits/s valen sµlo para un bus. Estamos hablando de un canal que consta de dos lÚneas cada uno, porque los dos buses no estÃn tan estrechamente entrelazados
como las dos lÚneas en el bus CAN. Se pueden usar por ejemplo para el mismo mensaje por razones de seguridad. TambiÕn se pueden transmitir diferentes mensajes con 2
por 10 Megabits/s. Hasta ahora no se ha practicado, pero tambiÕn podrÚa haber sµlo un bus (canal), asÚ como velocidades mÃs bajas.
| Las resistencias de terminaciµn reales son necesarias, pero con un poco menos de resistencia
total que con CAN. |
En resumen: hay dos buses, cada uno con dos lÚneas retorcidas y en su mayorÚa blindadas. El mÃximo de 24 metros se aplica entre dos nodos en el bus, los dos mÃs distantes en la estrella pasiva o entre el elemento
de acoplamiento y el participante en la estrella activa. La resistencia entre las dos lÚneas de un canal es de 80 a 110 ohmios.
|
|