 FlexRay - Aufbau FlexRay - Aufbau
| Bezeichnung | Funktion |
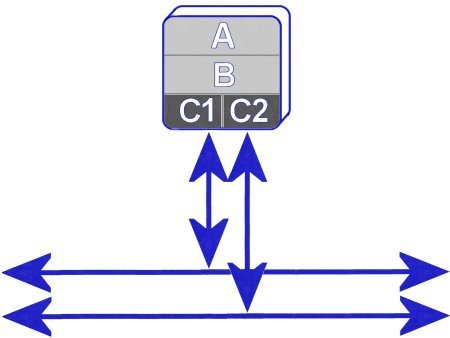
| A | Mikroprozessor |
| B | Controller |
| C1 | Bustreiber - Kanal 1 |
| C2 | Bustreiber - Kanal 2 |
Es gibt noch andere Vorteile, doch jetzt ist es genug der Vorrede. Getreu unserer Devise vom Einfachen zum Komplizierten beginnen wir mit der einfachsten Variante, der mit zwei
Teilnehmern. Dass die bis zu 24 Meter voneinander entfernt sein dürfen, ist höchstens für den Nutzfahrzeugbereich ein Problem. Übrigens sind weitere 20 Teilnehmer mit wiederum
höchstens 24 Meter Abstand möglich, maximal allerdings nur 72 Meter.
Gehen Sie von 10 MBit/s pro Kanal aus, was 20 Mal schneller ist als die vom High-speed-CAN in der Praxis erreichten 500 KBit. Aber es geht auch wieder etwas von dieser
Geschwindigkeit verloren, weil FlexRay feste zeitliche Zuordnungen hat und zunächst einmal nicht ereignisgesteuert ist. Damit gibt es aber keine Benachteiligungen mehr für niedrig
priorisierte Botschaften. Man nennt so ein System auch deterministisch (bestimmend).
Das System besteht aus dem statischen und dem dynamischen Segment. Ersteres ist in 'Static slots', letzteres in 'Mini slots' aufgeteilt. Solchen Netzknoten wie beispielsweise dem
Abstandsradar würden jetzt im statischen Teil feste Sendeplätze zugeteilt. Weniger wichtige, wie beispielsweise ein von (bis zu drei) Tankgebern mit Information versorgter Netzknoten,
müssten sich jedes Mal bei der Vergabe der Minislots anstellen.
| Grund-Topologie für FlexRay ist der Stern, aber auch der Bus ist möglich. |
Der Aufbau des Netzes (Topologie) kann bus- oder sternförmig sein und gestattet damit eine flexiblere Leitungsverlegung. Bei letzterem wird noch zwischen aktiver und passiver
Sterntopologie unterschieden, je nachdem, ob der Stern einen zentralen Koppler hat, eine Art Übermittler zwischen den einzelnen Steuergeräten des Sterns. Er ermöglicht die hohe
Übertragungsgeschwindigkeit auch bei sternförmiger Vernetzung, die beim Fehlen dieses Teil geringer wird.
Erster Serieneinsatz:
Dämpferkontrolle (Adaptive
Drive) im BMW X5 (2007) |
Der aktive Stern bildet quasi einen eigenen Bus, bei dem der Koppler die Botschaften verteilt. Typisch für FlexRay ist z.B. hier die besondere Aufgabenstellung eines Knotens und damit
seine Hervorhebung gegenüber den anderen. FlexRay benötigt auch sonst mehr Kontrolle an den Knoten. Außer dem Controller und Transmitter, der hier Bus driver (Bustreiber) heißt,
kommt noch ein sogenannter Communication-Controller hinzu (Bild ganz oben).
Die 10 MBit/s gelten nur für einen Bus. Wir sprechen hier von einem Kanal bestehend aus je zwei Leitungen, weil die beiden Busse nicht so stark miteinander verflochten sind wie beim
CAN-Bus die beiden Leitungen. Sie lassen sich für die gleiche Botschaft z.B. aus Sicherheitsgründen benutzen. Es können aber auch verschiedene Botschaften mit 2 * 10 MBit/s
ausgesendet werden. Es wurde zwar bis jetzt noch nicht praktiziert, aber es könnte auch nur ein Bus (Kanal) vorhanden sein, genauso wie geringere Geschwindigkeiten.
| Echte Abschlusswiderstände sind nötig, allerdings mit etwas weniger Gesamtwiderstand als bei
CAN. |
Zusammenfassend: Es gibt zwei Busse mit je zwei verdrillten und meist geschirmten Leitungen. Die maximal 24 Meter gelten zwischen zwei Knoten am Bus, den zwei am weitesten
entfernten am passiven oder zwischen Koppelelement und Teilnehmer am aktiven Stern. Der Widerstand zwischen den beiden Leitungen eines Kanals beträgt 80 bis 110 Ohm.
|