
|
 eDrive - Electricidad 2 eDrive - Electricidad 2
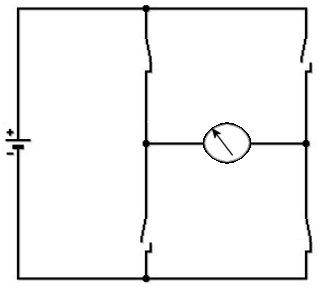
A la izquierda, la fuente de voltaje, que distribuye el voltaje positivo hacia arriba y el negativo hacia abajo. Así como los interruptores están configurados aquí, el voltaje positivo se aplica al lado izquierdo del medidor y
el negativo a la derecha. La desviación del puntero es correspondiente. Debajo exactamente la posición inversa de los interruptores, que tiene una inversión de polaridad en el medidor y nuevamente el indicador
correspondiente.
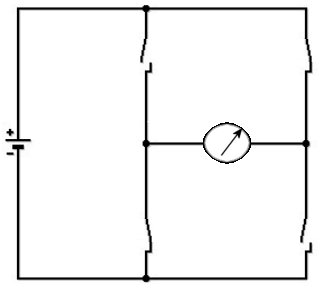
Es importante que ambos interruptores se activen de forma absolutamente simultánea, de lo contrario, hay un cortocircuito. żQué logramos a través de esto? Mediante una correspondientemente rápido conmutación
es producido una transformación de DC a AC. Este es necesario con el coche eléctrico, por ejemplo, para accionar el motor eléctrico con la ayuda de una batería. Por el contrario, lo necesitamos al cargar la batería
desde la red de CA.
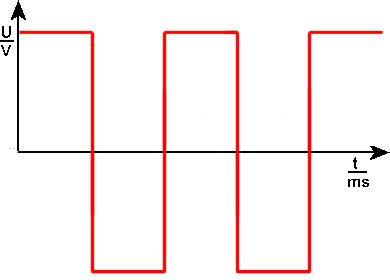
Sin embargo, si queríamos suministrar hacia allí, como hace el inversor de un sistema solar, entonces tendríamos que generar 50 Hz, entonces conmutar 100 veces por segundo. Demasiado rápido para una
operación mecánica o puramente eléctrica. Además, de la manera descrita anteriormente, desafortunadamente, solo generamos una seńal de onda cuadrada, que no acopla a una tensión de red.
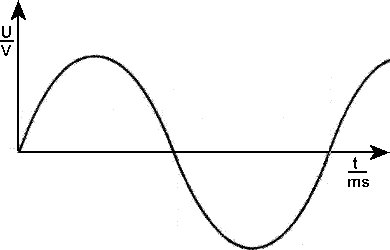
Ese es el transcurso que necesitamos, bonito sinusoidal. A continuación puede ver que se necesita un transistor de potencia aquí, cuatro veces para reemplazar los interruptores mecánicos. Con transistores de
potencia, son posibles frecuencias de conmutación de 10,000 Hz y más. Así que hay alrededor de 100 operaciones de conmutación que quedan dentro de una onda sinusoidal. Y si este transistor se calienta
demasiado, se puede proporcionar en la parte posterior con placa de refrigeración y grasa térmica.
Por supuesto, él todavía necesita ser controlado en consecuencia. Usamos este control para una llamada modulación por ancho de pulsos. Esto es ahora bastante común en los vehículos de motor. Imagina que
has diseńado el ventilador para la ventilación del interior para la cuarta etapa y los otros realizados mediante la interposición de varias resistencias.
Dependiendo de la potencia del motor, podrían calentarse tanto que debían depositarse en un conducto de ventilación. Estar caliente también indica un desperdicio de energía y esto no debemos permitirnos más. El
motor es impulsado tan rápido hoy por la electrónica en las etapas más débiles, que surge a través de las pausas un debilitamiento de la potencia del motor.
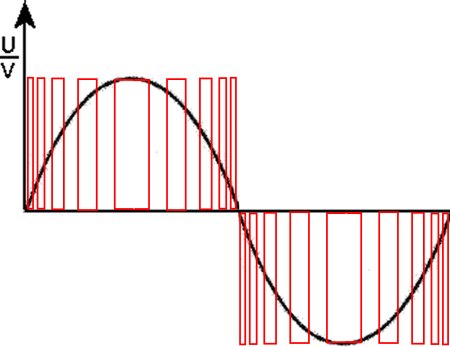
Aquí puede ver cómo el tiempo de activación para la salida de dicho circuito PWD se extiende a la mayor oscilación posible y luego se vuelve a acortar. Por supuesto, una división tan áspera conduciría a una onda
sinusoidal escalonada. Así que el control con la tecnología descrita es mucho más fino. Y, por supuesto, no solo se puede cambiar la amplitud, sino también la frecuencia, exactamente lo que necesitas para regular
el motor.

Así que ese sería el diagrama de circuito razonablemente completo, desde la corriente directa de la batería de alto voltaje hasta las tres fases para el motor eléctrico. Se habla de puentes, en cada uno de los cuales
se ubican dos interruptores y semipuentes, cada uno con un interruptor. Un puente sería un vertical para generar cada uno de L1, L2 y L3. Los interruptores rápidos ahora permiten la modulación de ancho de pulso.
El control de cada interruptor debe estar alineado exactamente entre sí, así como arriba el control de los interruptores los cuales son operados a mano. Por lo tanto, los puentes se siguen desplazados en 120°. Al
mismo tiempo, los dos interruptores de los semipuentes se activan simultáneamente pero en direcciones opuestas.

Se habla de comparadores cuando se trata de controlar el interruptor. Estos necesitan el transcurso de una línea sinusoidal, si quieres reproducir estos por modulación de ancho de pulso. El reloj igualmente
importante tiene lugar mediante oscilaciones rápidas (imagen de arriba), que parecen grabadas como triángulos. Por lo tanto, se se tomará medida por tanto en cada oscilación en la curva senoidal y esto transmitió
como longitud de impulso y longitud de espera al respectivo interruptor.
Entonces, todavía no se incluye el control real del motor. Presumiblemente, la curva sinusoidal se cambia. En términos generales formulado cuya frecuencia habría que aumentar, cuando el régimen de revoluciones
del motor se supone que debe aumentar y su amplitud, si así lo requiere del motor a la misma rpm más par. Sin embargo, el control del motor ya es más complicado, dependiendo de si se trata de campos
precursores con una distancia constante (motor síncrono) o campos eléctricos pasando una y otra vez.
|
|