 LIN-Bus 1 LIN-Bus 1

Der LIN-Bus ist ein —rtlich begrenzt verbindendes Netzwerk (Local Interconnect Network) mit einer Ébertragungsrate von bis zu 20 KBit/s (Klasse A). Ein
wichtiger Grund f■r seine Einf■hrung war wohl die deutlich geringere zu erwartende Kostenbasis. Durch die enorme Verbreitung auch von Eindraht-CAN sind aber dessen Bauteile so
g■nstig geworden, dass sich die Erwartung nicht ganz erf■llt hat.
LIN-Bus
z.B. als lokales Sub-System |
Im Gegensatz zum CAN-Bus gilt der LIN-Bus als Sub-Bus und hat einen am CAN-Bus angeschlossenen Master und bis zu 16 mit deutlich weniger Aufgaben beauftragte Slaves
(Untergeordnete). Daher auch die Hoffnung auf Verbilligung. Durch entsprechenden Aufwand bei der Synchronisation darf bei denen sogar der lokale Zeitgeber (Timer) fehlen, denn die
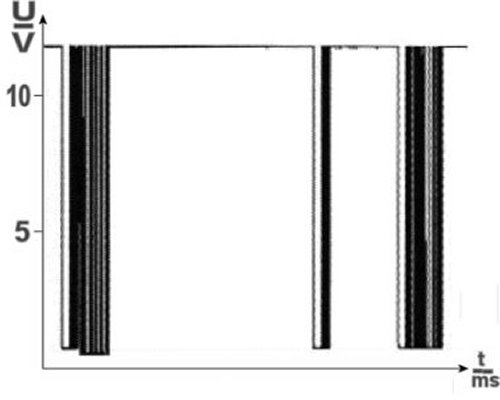
wird durch den Bus ■ber mehr als ■bliche Impulse gen■gend genau vorgegeben. Noch ein wichtiger Unterschied: Ein LIN-System arbeitet mit einem Spannungshub von ca. 12 Volt.
| Einfach, kosteng■nstig, offen, langsam, mit groÔen Zeittoleranzen |
Es bleibt also der Merksatz bestehen: Mit gr—Ôerer Geschwindigkeit sinkt der Spannungshub, mit geringerer steigt er, weil zum Erreichen eines gr—Ôeren Spannungshubes mehr Zeit
n—tig ist. Die Spannungsh—he muss durch steile Flanken relativ schnell erreicht werden, damit der Lesende eine gesicherte Spannungsh—he vorfindet. Mit der Funktion eines Slaves
k—nnen eventuell die Sensoren/Aktuatoren beaufschlagt werden, so dass man den LIN-Bus nicht immer als solchen wahrnimmt.
Aus Sensoren/Aktuatoren werden im LIN-Bus
Controller. |
Die Erweiterung eines CAN-Busses durch LIN lðsst sich nahtlos an unsere Betrachtung von m—glichen Nachteilen des CAN-Busses anschlieÔen. Im Grunde nimmt ein Teilnehmer
Verbindungen zu mehreren Sensoren/Aktuatoren auf. Dadurch wird es nicht nur billiger, sondern auch der Bus entlastet. Eine gewisse —rtliche Nðhe aller Teilnehmer des LIN-Busses ist
sinnvoll, aber nicht Bedingung.
Teile bisheriger Erklðrungen wiederholen sich jetzt. Wieder ist der logische Zustand 1 rezessiv (diesmal 12-14 V) und der Zustand 0 dominant (0,7 - 1 V). Wie bei unserem als ersten
besprochenen CAN-Bus kommt er mit einer Leitung (z.B. 0,35 mm2) und ohne Abschirmung aus. Ein erster Anwendungsbereich ist z.B. der Innenraum mit seiner Komfortelektronik.
| LIN-Datenleitung in violetter Grundfarbe |
Der Master hat die zusðtzliche Funktion eines Gateways, weil er auch Teilnehmer am CAN-Bus ist. Er setzt Anforderungen des CAN-Busses auf den LIN-Bus um und umgekehrt. Der
gesamte Datentransfer zwischen beiden Bussen und auch die Diagnose einzelner Slaves geht ■ber ihn. Zusðtzlich bestimmt er den Takt im LIN-Bus. Er ist der einzige im LIN-Bus, der
Aktionen ausl—sen kann.
| Rezessiver Pegel | nahe der Batteriespannung |
| Dominanter Pegel | nahe der Nullspannung |
Der anhaltende rezessive Pegel deutet auf einen Bus in Ruhestellung hin. Botschaften werden also immer durch einen Wechsel vom rezessiven zum dominanten Signal eingeleitet.
Dieses dauert 13 Bitzeiten und wird als Synchronisationspause bezeichnet. Nach einem rezessiven Bit beginnt die eigentliche Synchronisation (Synch Field) mit im Wechsel f■nf Mal 0
und 1. Das Synchronisieren ist deutlich aufwðndiger als beim CAN-Bus.
| Bezeichnung | Lðnge |
| Pause | 0-Bits |
| Synchronisationspause (Synch Break) | max. 13 Bits |
Synchronisationsfe
ld '0' und '1' wechselnd | 10 Bits |
| Kennziffer (Identifier) | 6 Bits |
| Pr■fsumme (Checksum) | 2 Bits |
| Datenfelder (Data Fields) | 8* (1+8+1) Bits |
Damit wir uns richtig verstehen, die ganze Initiative des Sendens aus der Pause heraus liegt beim Master. Das ist immer so. Slaves k—nnen keine Botschaften auf den Bus bringen. Das
einzige, was sie d■rfen, ist antworten, wenn sie gefragt werden. Das erkennen sie am Header, der vom Master nach der Synchronisation gesendet wird. Der fordert damit einen ganz
bestimmten Slave auf, das jetzt folgende Feld mit Daten zu f■llen.
| Alle Aktivitðten gehen vom Master aus. |
Etwas vereinfacht k—nnte man den LIN-Bus mit einem FlieÔband vergleichen. Je nach Bedarf werden (durch den Master) verschiedene leere Schachteln auf das Band gesetzt. Aufgabe
der Mitarbeiter am Band (Slaves) ist es, bestimmte Schachteln mit ihren Produkten zu f■llen und andere passieren zu lassen.
| Bis zu 8 Bytes (64 Bits) Daten sind m—glich. |
Soweit die Slave-Controller an Sensoren. Die haben im Prinzip nur Werte mitzuteilen. Handelt es sich um einen Slave-Controller an einem Aktuator, so erhðlt der Befehle vom Master, die
dieser in den Datenblock geschrieben hat. Der Master sendet immer so, als ob das Fahrzeug voll ausgestattet wðre. Es k—nnen also wðhrend des Umlaufs stðndig Datenbl—cke leer
bleiben, weil im Fahrzeug nur die Basisausstattung eingebaut ist.
Die eigentliche Information kann im Datenfeld immer nur in jeweils 8 Bits gespeichert werden. Davor wird ein dominantes Startbit und dahinter ein rezessives Stoppbit gesendet. Auch
hier also wieder verstðrkte Bem■hungen zur Aufrechterhaltung der Synchronisation wegen fehlender Timer. Insgesamt sind also 8 * 10 Bit im Datenfeld m—glich.
Die enge Beschrðnkung der Slaves-Rechte ist auch darin begr■ndet, dass diese von auÔen zugðnglich angebracht werden und auch mit der AuÔenwelt kommunizieren k—nnen,
z.B. mit dem øffner f■r das Garagentor. Da sie durch Eigenaktivitðt nicht ins System gelangen k—nnen, ist hier eine L■cke z.B. im Diebstahlschutz durch entsprechende Software
ausgeschlossen.
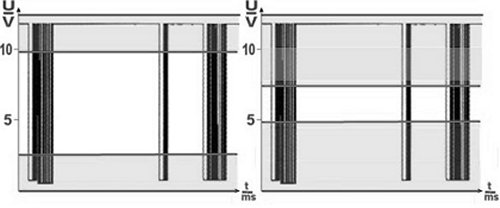
Die Fehlertoleranz ist durch groÔen Spannungshub relativ groÔ. Wenn wir von 12 V Batteriespannung ausgehen, weil der LIN-Bus nat■rlich auch ohne laufenden Motor funktionieren
muss, geht der indifferente Bereich beim Senden von 2,4 V bis 9,6 V (je 20 Prozent - Bild links) und beim Empfangen sogar von 4,8 V bis 7,2 V (je 40 Prozent - Bild rechts). Gesendet
wird also in einem deutlich engeren Toleranzbereich als Empfangen.
Das System erlaubt es, weitere Slaves ohne ánderungen an Hard- oder Software der anderen hinzuzuf■gen. Statt 16 m—glichen bleibt deren Anzahl meist mit bis zu 12 durch nur 64
m—gliche Botschaften begrenzt. Wie beim CAN-Bus ist der jeweilige Identifier also von den Botschaften bestimmt. Dadurch k—nnen auch mehrere Slaves gleichzeitig angesprochen sein
oder untereinander nur Botschaften austauschen, nat■rlich immer unter der Aufsicht des Masters.
LIN-Bus
nicht nur f■r den Innenraum-Komfort |
|